
Deixo aqui o meu projecto de fim de verão de 2009, a construção e modificação de um axial ax10 , o que se pretende aqui é basicamente um veículo extremamente articulado , com um centro de gravidade o mais baixo possivel sem comprometer demasiado os angulos de ataque e clearance necessária a progredir nos obstáculos e ao mesmo tempo ser capaz de resistir a inclinações verticais e laterais consideráveis, claro que conseguir tudo isto não é fácil e alguma coisa vai ficar sempre melhor que outra , então cá vai :
- Ainda durante a montagem do kit substitui estes parafusos por uns de cabeça chata para que não fiquem "presos" aquando da passagem de alguns tipos de obstáculos , é uma modificação praticamente sem custos

- depois da construção do kit cortei as espumas de trás em estrela , á frente usei espumas de memória da proline , optei por pneus Losi Rock Claws / Rock Carvers , os últimos mais pesados cerca de 400g a frente e 300 gramas atrás


- nas jantes foi colocado lastro de forma a obter um peso final jante+pneu de cerca de 250g a frente e 180g atrás

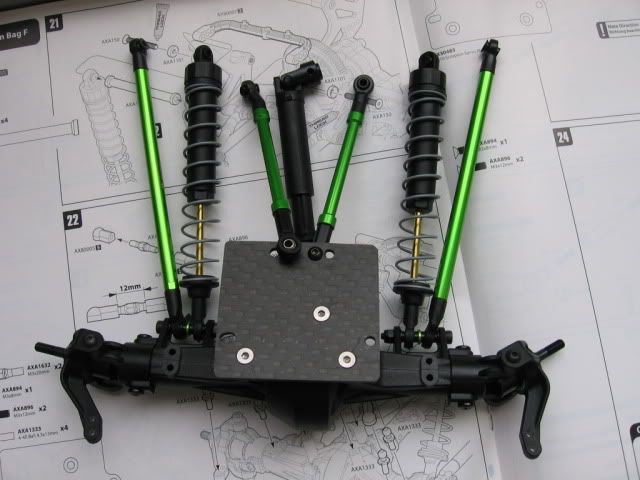
- de forma a minimizar o torque twist fiz uma placa em carbono traseira home made para ficarmos com 4 links , normalmente basta colocar os 4 links no eixo traseiro não sendo necessário colocar a frente
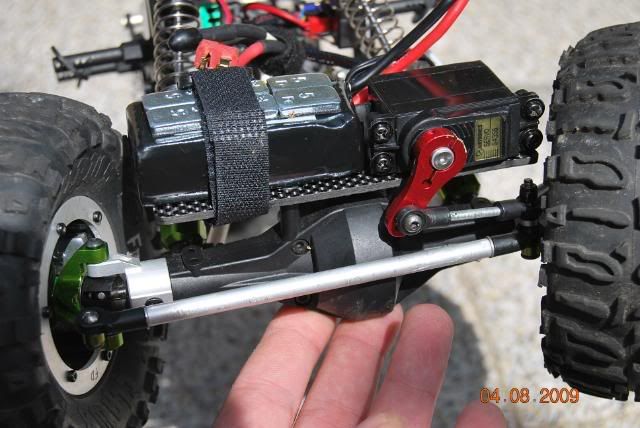
- Optei por fazer outra dianteira mas maior e modificada tambem para ter 4 links mas o servo foi recolocado de forma a permitir a colocação de um lipo de 1500mah 30c de 11,1v iguais as que são usadas no aviões e helis , muito baratas e até agora estou bastante satisfeito com a compra , recordo apenas que nem todos os variadores / motores admitem 11,1v


- O motor escolhido foi um Integy Pro V10 80T de escovas , um motor barato já que toda a gente opta hoje pelos V11 , muito suave e com um torque impressionante :

-Variador optei pelo mamba max da castle creations , para mim o mais versátil e robusto , tem um drag brake espectacular que nos interessa bastante na condução de um crawler e admite lipos de 11,1v que dão a estes motores de escovas um torque imenso , não sendo o local ideal acabei por o arrumar na parte de cima do chassis , fiz uma base em carbono que foi aparafusada no local , o setup do Variador que me pareceu melhor até agora foi este , usando li-pos de 11,1v que proporcionam ao motor um torque imenso.

Tive necessidade de ligar um UBEC já que o Mamba max apenas debita 5v deixando o servo a trabalhar muito abaixo das suas possibilidades , desta forma conseguimos 6v , fica o esquema de ligação :

- Depois de experimentar vários servos , optei por Airtronics 94358 de 14,4kg e 0.10 seg
- Os amortecedores que comprei foi os da 3racing , com as molas originais atrás mais duras e molas da HR mais moles à frente , interessava aqui tal como nos amortecedores originais encurtar um pouco os amortecedores pelo usei cerca 5mm de tubo de combustível dentro do amortecedor para o efeito
Fiquei neste caso com um amortecedor de 115mm enquanto que no amortecedor original com esta modificação ficamos com cerca de 120mm , baixando a distancia do chassis ao solo e o centro de gravidade

Os amortecedores foram igualmente montados ao contrário para baixar o centro de gravidade , usei oleo 35wt a frente e 50wt atrás , neste campo as opiniões são diversas e depende tambem das molas que estamos a usar
Optei por um skid central em delrin ( acetal ) , excelente material para rock crawler stress-free , muito resistente e robusto, este skid plate permitiu-me montar os tirantes inferiores dentro do chassis afastando-os assim dos obstáculos , ao mesmo tempo que aumentou a triangulação central importante tambem para diminiuir o torque twist

Foram colocados tirantes inferiores de 30 graus apenas atrás já que a frente pelo que me pude aperceber os tirantes originais trabalham melhor pois funcionam como rampa para permitir que o skid central não fique atascado .

A carroçaria escolhida foi uma pickup Chevy de 1975 que me pareceu "mais a escala" , carroçaria para os chassis m03 da Tamiya

Sem comentários:
Enviar um comentário